Actualizamos nuestro modelo funcional a escala 1:2 de Rosalind Franklin, el rover planetario de la misión ExoMars.
Acerca de ExoMars 2020
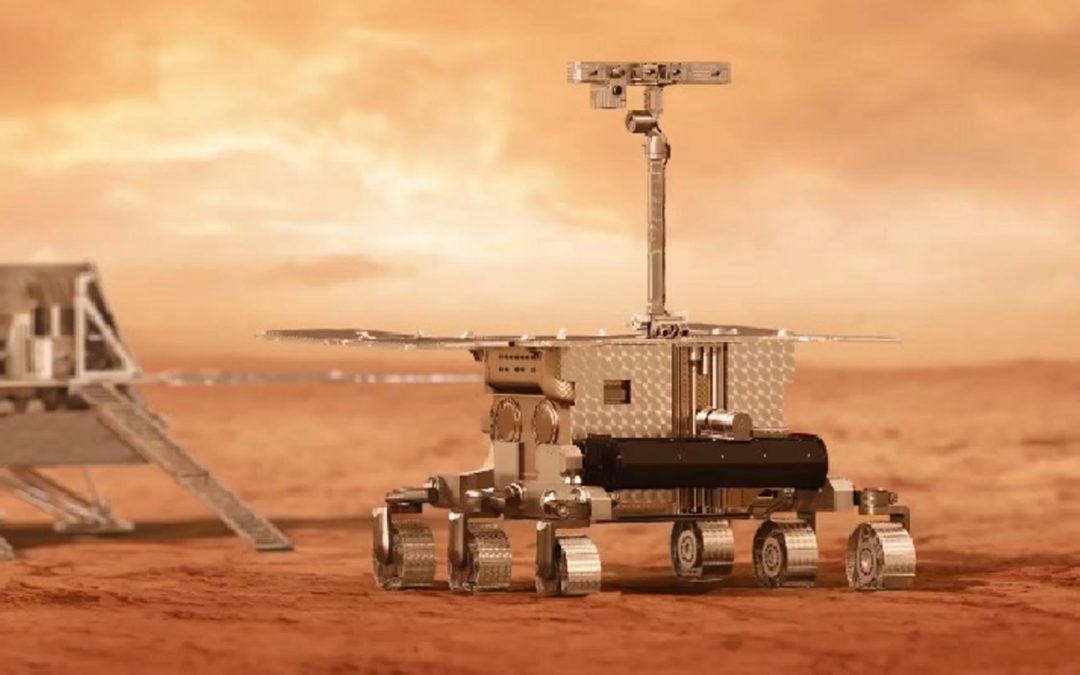
ExoMars 2020 llevará un rover y una plataforma de superficie a nuestro planeta vecino. Igual que en la anterior misión de ExoMars, se ha escogido un cohete Proton ruso formalmente conocido como UR-500 para realizar el lanzamiento; que tendrá lugar a lo largo del 2020 en una fecha aún indeterminada. Al lanzamiento lo sucederá un viaje interplanetario de nueve meses hacia Marte; durante esta fase, un módulo portador transportará la plataforma de superficie y el rover dentro de un único carenado protector. Una vez en Marte, el módulo de descenso se separará del portador, y una compleja secuencia de despliegue de paracaídas seguida de la breve fase de frenado por retropropulsión aterrizará el equipo en Mawrth Vallis u Oxia Planum, los dos candidatos finales como lugares de aterrizaje. Después de aterrizar, el rover saldrá de la plataforma y ambos comenzarán sus respectivas misiones.
Exomars 2020 es la segunda y última misión del programa ExoMars. La primera fue ExoMars 2016, que consistía en el Orbitador para Trazas de Gas (TGO) y Schiaparelli EDM (Módulo demostrador de Entrada, Descenso y aterrizaje). El objetivo principal de TGO era desentrañar los misterios que esconden el metano y otros gases atmosféricos que podrían ser indicadores de una posible actividad biológica o geológica en el planeta. El satélite está en pleno funcionamiento y mantiene su órbita estable alrededor de Marte, de hecho, su antena de alta ganancia se utilizará para establecer comunicaciones con ExoMars 2020. Schiaparelli, por su parte, estaba destinada a evaluar las capacidades de entrada, descenso y aterrizaje de la ESA. El aterrizaje falló en la fase final, pero la telemetría del descenso se envió con éxito y ha ayudado a mejorar los sistemas de aterrizaje futuros como el que se utilizará en ExoMars 2020. ExoMars 2016 fue un programa dirigido por la Agencia Espacial Europea (ESA) en cooperación con Roscosmos, la agencia espacial rusa, que proporcionó el vehículo de lanzamiento. En esta segunda aventura (ExoMars 2020), Roscosmos ha dado un paso adelante, ya que además de proporcionar el vehículo de lanzamiento, está a cargo del diseño y construcción del módulo de descenso y la plataforma de aterrizaje.

Acerca de Rosalind Franklin
Rosalind Franklin es el rover planetario de la misión ExoMars 2020, llamado así en honor a la química y cristalógrafa de rayos X homónima que contribuyó a la comprensión de la estructura molecular del ADN. Si aterriza con éxito, el rover viajará varios kilómetros por la superficie marciana en busca de signos de vida. Los posibles lugares de aterrizage han sido considerados con esta misión en mente, y se cree que tienen potencial de albergar material orgánico bien conservado datado en la prehistoria del planeta. El rover recogerá parte de este material con un taladro expresamente diseñado para extraer muestras de diversas profundidades hasta un máximo de dos metros. Esto es importante debido a que la poca protección que ofrece la tenue atmósfera marciana frente a la radiación diezma la durabilidad de las estructuras moleculares, y por lo tanto, los posibles restos orgánicos se habrán conservado mejor bajo la superficie y las muestras subterráneas tendrán más probabilidades de incluir biomarcadores.
El rover es básicamente un laboratorio sobre ruedas: una vez recolectadas, las muestras se entregan al laboratorio analítico interno donde son analizadas in situ con instrumentos de última generación que deberían determinar la composición del suelo e identificar la presencia de diferentes sustancias como minerales, sustancias orgánicas y biomarcadores. El equipo científico del Rover ExoMars 2020 suma un total de nueve instrumentos concebidos bien para la detección o para el análisis de muestras: PanCam (Cámara Panorámica), que realizará un mapeo digital del terreno de Marte y localizará posibles muestras. WISDOM (Observación de Depósitos de Agua Helada y del Subsuelo en Marte), un radar que penetra en el suelo para caracterizar la estratigrafía bajo el rover y decidir dónde recolectar muestras para su análisis. Adron, para buscar agua subterránea y minerales hidratados bajo la subsuperficie sobre la que se encuentre el rover y seleccionar áreas adecuadas para perforación y recolección de muestras. ISEM (Espectrómetro Infrarrojo para ExoMars), que evaluará la composición mineralógica de los posibles objetivos en la superficie y seleccionará los más adecuados para su posterior análisis mediante otros instrumentos. CLUPI (cámara de cerca), que fotofrafiará primeros planos en color y alta resolución de los elementos recogidos en la perforación. Ma_MISS (Cámara Multiespectral para Estudios Subterraneos en Marte), que contribuirá al estudio de la mineralogía marciana y de las formaciones rocosas. MicrOmega, un espectrómetro visible e infrarrojo para estudios de mineralogía en las muestras. MOMA (Analizador de Moléculas Orgánicas de Marte), que se buscará biomarcadores en las muestras para responder a las preguntas relacionadas con el posible origen, evolución y distribución de la vida en Marte. Y el RLS (Raman Laser Spectrometer), cuya base de datos hemos diseñado, que establecerá la composición mineralógica de las muestras e identificará los pigmentos orgánicos.

Sobre nuestro robot 1:2
A lo largo de estos últimos meses, hemos estado trabajando en un modelo robótico a escala y completamente funcional del rover Rosalind Franklin de ExoMars, y nos congratula anunciar que la fase beta ya está disponible para hacer demostraciones y colaborar en proyectos educativos. Utilizando programas CAD (Diseño Asistido por Ordenador), nuestro equipo 3D ha diseñado desde cero la estructura principal del robot. Seguidamente la construimos a partir de perfiles de aluminio anodizado estándar y piezas impresas en 3D de diseño personalizado. En el interior, el vehículo cuenta con várias cámaras incorporadas, una fuente de alimentación, motores individuales para el movimiento de cada rueda y servos para la orientación de las ruedas y de la cámara. Los subsistemas de control para estos componentes electrónicos están basados en Arduino y el software de control global y su interfaz visual han sido desarrollados enteramente por Space-Robotics. El software admite tanto comandos de movimiento individuales como series preprogramadas de los mismos. El resultado de todo este proyecto es una maqueta 1:2 del rover de ExoMars que sigue nuestras instrucciones y tiene la capacidad de moverse en cualquier dirección y superar de forma autónoma grandes obstáculos.
Acerca de la nueva versión
Puesto que cada pieza de la estructura principal del robot está fabricada a medida, podemos fácilmente, tras examinar los resultados de las pruebas realizadas, construir versiones mejoradas de estas piezas y reemplazarlas. Repetimos con frecuencia este proceso para mejorar el diseño del vehículo, y, por lo general, no nos lleva mucho tiempo. Ahora mismo no queda en el robot prácticamente ninguna de las piezas originales; y el resultado de todos estos cambios es un rover más resistente y fiable. Sin embargo, las pruebas a veces sugieren que deberíamos cambiar algunos de los componentes electrónicos, lo que requiere de más tiempo y grandes esfuerzos. Una de estas «grandes actualizaciones» fue el reemplazo de todos los motores que rotaban las ruedas. Originalmente, escogimos motores paso a paso debido a que estos ofrecen un mayor control, pero pronto nos dimos cuenta de que no eran lo suficientemente potentes como para mover el vehículo con suavidad. Durante las últimas semanas los hemos reemplazado todos por motores de corriente continua, que han demostrado ser justo lo que estábamos buscando.
Ahora mismo estamos trabajando en la resistencia de los servos que orientan las ruedas, y de momento no estamos seguros de si vamos a reemplazarlos o si podemos resolver el problema imprimiendo unos refuerzos. Mientras tanto, seguimos utilizando el rover como banco de pruebas para nuevas tecnologías y futuros modelos más complejos, así como para hacer demostraciones públicas y colaborar en proyectos educativos de colegios y universidades. Cúando terminemos de mejorar el diseño actual del rover, nuestros próximos pasos iran encaminados a incluir nuevos subsistemas como paneles solares, baterías y una fuente de energía interna, instrumentos científicos e incluso un sistema de navegación autónomo. Mantenéos actualizados para no perderos la próxima versión del «Robot 1:2 del Rosalind Franklin de ExoMars».

Imagen de Portada © ESA
Imágenes Embebidas © SpaceRobotics – Nubalo Studios
Video © SpaceRobotics – Nubalo Studios